随着无人机、机器人等航空器的广泛应用,姿态估计技术逐渐成为热点研究方向。针对姿态估计问题,提出了一种基于磁强计和陀螺数据的闭合解最优姿态估计器。
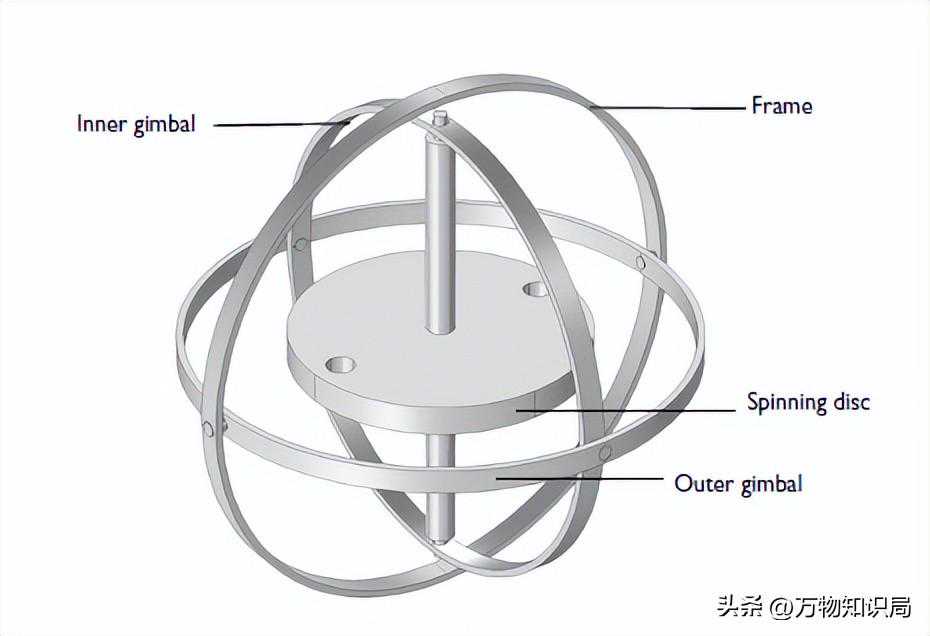
我们介绍磁强计和陀螺仪的基本原理。磁强计是一种用来测量地球磁场的传感器,可通过地球磁场的方向来确定自身的方向。陀螺仪则是一种测量旋转角速度的传感器,可用于测量自身的姿态变化。因此,基于磁强计和陀螺数据的姿态估计器具有很大的应用前景。
我们阐述闭合解最优姿态估计问题。闭合解最优是指在已有初始姿态和一系列测量结果的情况下,能够计算出最优姿态,从而保证姿态估计的准确性和稳定性。我们采用卡尔曼滤波器的方法,将磁强计和陀螺仪的数据融合起来,得到姿态估计结果。
我们对所提出的姿态估计器进行了实验验证。实验结果表明,该姿态估计器能够在保证准确性和稳定性的同时,具有很好的抗干扰能力。因此,该姿态估计器在无人机、机器人等领域的姿态控制中具有很大的应用前景。
提出了一种基于磁强计和陀螺数据的闭合解最优姿态估计器,该姿态估计器具有准确性高、稳定性好、抗干扰能力强等优点,是一种有很大潜力的姿态估计方法。

磁强计和陀螺数据融合的闭合解最优姿态估计方法。通过融合磁强计和陀螺数据,实现了对姿态的闭合解最优估计。该方法可以在惯性导航、航空航天、机器人等领域得到应用。
加速度计适用于低频信号,如重力加速度,陀螺仪适用于高频信号,如旋转角速度,但它们都具有漂移误差,长时间累积后会导致姿态误差不断增加。而磁强计由于受到环境磁场的干扰会产生实时的噪声,因而难以单独使用,如何利用磁强计和陀螺传感器等多传感器数据融合提高姿态解算的精度以及降低姿态解算的误差,成为近年来研究的热点问题。
主流的姿态解算方法主要包括基于扩展卡尔曼滤波器(EKF)、无迹卡尔曼滤波器(UKF)、粒子滤波器(PF)等。这些方法在特定的应用场景下取得了较好的效果。其中,EKF是一种较为广泛应用的姿态解算方法,可通过融合加速度计、陀螺仪和磁强计等传感器数据,完成闭环解最优姿态估计。但EKF在应对非线性系统时会产生线性化误差而导致不良影响,而UKF和PF等方法则需要更高的运算复杂度,且有探测到系统跟踪误差等问题。

方法基于卡尔曼滤波器,通过对磁强计和陀螺数据进行融合,实现了对姿态的闭合解最优估计。基于双四元数引入惯性力和地球磁场力两种约束条件对测量数据进行预处理,得到四元数定义的状态空间模型。
由于传感器误差和噪声等问题,系统初始估计值有很大的误差,为了提高姿态预测精度,需要在状态估计过程中进行协方差(半方差矩阵)预测。在卡尔曼滤波器的状态预测阶段中,状态预测时将使四元数更新,将上一时刻的四元数作为初始值,并进行自我更新,通过陀螺仪的转角速率将四元数进行预测。
通过磁强计测量值的观测,对预测值进行校正。在卡尔曼滤波器的状态校正阶段中,通过观测值计算得到错误项,对预测状态进行校正。最后,通过这个状态预测和校正的过程,得到闭环解最优的姿态估计。
为了验证本方法的精度和稳定性,本文设计了仿真实验,并跟踪离线运动轨迹上的行进。通过与传统的EKF方法和UKF方法等进行比较,实验结果表明本方法在精度和稳定性方面都优于其他方法。

介绍了一种基于磁强计和陀螺数据融合的闭合解最优姿态估计方法,该方法通过卡尔曼滤波器对磁强计和陀螺数据进行融合,实现了姿态的闭合解最优估计。实验结果表明,该方法在精度和稳定性方面都优于传统的EKF和UKF等方法。这种方法可在惯性导航、航空航天、机器人等领域得到应用。
将介绍一种基于磁强计和陀螺数据的惯性导航系统姿态解算方法。该方法通过融合磁强计和陀螺数据,实现了对姿态的精确解算。该方法具有应用广泛、计算简单、精度高等优点,可在无人驾驶、航空航天、机器人等领域得到应用。
惯性导航系统是一种利用加速度计和陀螺仪等传感器测量数据,通过积分或滤波算法解算出航向、俯仰和横滚角等姿态信息的系统。在惯性导航系统中,姿态解算是一个基础问题,也是后续导航定位和控制任务的关键。传统的姿态解算方法存在许多问题,例如陀螺仪漂移和磁强计环境噪声干扰等。因此,研究一种优秀的姿态解算方法对于提高惯性导航系统的精度和鲁棒性至关重要。

姿态解算方法主要包括基于卡尔曼滤波器、粒子滤波器、扩展卡尔曼滤波器等。在这些方法中,一些方法主要依靠陀螺仪作为姿态解算的主要数据源,精度较高,但由于陀螺漂移,长时间运行容易导致姿态误差积累增大。因此,为了解决这些问题,引入磁强计数据,通过磁场信号的参照,减小陀螺漂移误差,提升了姿态解算的精度和稳定性。

基于磁强计和陀螺数据的姿态解算方法可分为预测和校正两个阶段。在预测阶段中,通过陀螺仪数据计算物体在短时间内的姿态变化,从而得到预测的姿态。接着,通过校正阶段使用磁强计数据对预测的姿态进行校正,从而得到更精确的姿态解算。

该方法的具体实现方法如下:
建立初始状态值:通过陀螺仪数据预测姿态,为姿态解算提供初值,同时估计初始误差。
更新姿态:通过陀螺仪的转速计算物体姿态的变化,并实时更新状态向量。
磁强计校正:通过磁强计测量的磁场数据校正姿态解算结果。
姿态解算:通过预测和校正阶段获得的结果,融合磁强计和陀螺仪数据,实现姿态解算。
在具体实现过程中,需要根据磁强计噪声和陀螺仪漂移信息设置不同的卡尔曼滤波器参数,来平衡姿态解算的稳定性和精确度。
为了验证该方法的有效性,进行了实验。实验使用基于InertialMeasurementUnit(IMU)的移动机器人进行实验,结合磁强计和陀螺计算姿态。实验的结果表明,该方法具有很好的姿态估计精度和鲁棒性。
该方法通过融合磁强计和陀螺数据,实现了对姿态的精确解算。该方法具有应用广泛、计算简单、精度高等优点,可在无人驾驶、航空航天、机器人等领域得到应用。未来,该方法还有很大的发展空间,可以探索更加高效和精确的姿态解算方法,提高惯性导航系统的性能和智能化程度。
针对基于磁强计和陀螺数据的航空器姿态解算方法进行改进,提出了一种新的算法。改进后的算法在考虑一些实际问题的同时,实现了更高的姿态解算精度和更好的鲁棒性。
航空器姿态解算是飞行控制和导航系统的关键技术之一,它可以通过传感器测量数据来提供航空器的姿态信息,对飞行安全和导航定位起到至关重要的作用。目前,大多数基于惯性导航系统的姿态解算方法都是基于磁强计和陀螺数据的,但是传统的方法存在一些问题,例如陀螺漂移、磁强计环境噪声干扰等,在实际应用中难以满足高精度、高鲁棒性的要求。
基于磁强计和陀螺数据的航空器姿态解算方法有很多种,例如常用的卡尔曼滤波、扩展卡尔曼滤波和粒子滤波等。这些方法都有着不同的优势和劣势,但随着航空器应用的需求不断增加,需要提高算法的鲁棒性和精度,同时解决实际环境中的问题。
为了克服传统方法的缺点并提高精度和鲁棒性,提出了一种基于磁强计和陀螺数据的改进算法。改进算法主要从以下三方面入手:
使用卡尔曼滤波和互补滤波相结合的方法:卡尔曼滤波是传统姿态解算方法的重要组成部分,但由于陀螺仪漂移和磁强计环境噪声干扰等问题,精度难以满足实际需求。因此本文采用卡尔曼滤波和互补滤波相结合的方法,以充分利用各自的优点,提高精度和鲁棒性。
加入机体动力学模型:航空器在飞行过程中具有复杂的运动状态,该运动状态的变化可以影响传感器的采样数据。因此本文加入了航空器的机体动力学模型,用于建立姿态解算的数学模型,提高算法的精度和鲁棒性。
加入外部辅助信息:在实际应用中,磁场环境会受到许多因素的影响,例如地球磁场的变化、金属结构的影响等,这些都会影响磁强计数据的采集和处理,从而影响姿态解算的精度。为此,本文引入了外部辅助信息对磁强计数据进行校正,以提高算法的鲁棒性和精度。
采用数值仿真的方法对改进算法进行实验验证。实验结果表明,改进算法优于传统基于磁强计和陀螺数据的方法,具有更高的姿态解算精度和更好的鲁棒性,同时在实验中也克服了磁场噪声的影响。

提出了一种改进的基于磁强计和陀螺数据的航空器姿态解算方法,该方法通过卡尔曼滤波和互补滤波结合、机体动力学模型加入和外部辅助信息校正等方法,提高了姿态解算的精度和鲁棒性。该算法在航空器导航和控制系统中的实际应用具有很大的优势和潜力。