气动人工肌肉(PAM)是柔软且灵活的线性气动执行器,可产生类似人体肌肉的驱动。肌肉执行器具有适用于各种机器人平台以及医疗应用的适应性。尽管存在多种可能的致动方案,但仍然需要开发一种重量非常轻、紧凑且灵活且具有高功率重量比的软致动器。
气动人工肌肉如今,机器人系统的发展变得越来越普遍,可能的应用包括与人类一起工作的个人或移动机器人,以及用于恢复或提高人类能力的外骨骼。由于其灵活性和柔软性,气动人工肌肉(PAM)在过去30年中已发展成为市场上其他可用执行器中可能的执行策略。
人工肌肉执行器领域是高度跨学科的,吸引了来自机械工程、材料科学、电气工程、生物学和物理学领域的许多研究人员。PAM是简单的机械执行器,由编织网套内的弹性囊组成,并带有两个端部配件以密封肌肉的两端。
当气囊被空气加压时,致动器要么收缩要么轴向延伸,运动方向取决于编织套管纤维的方向。收缩性PAM能够比拉伸性PAM产生更大的力,并且不易发生屈曲;因此,收缩式PAM更常用,也称为收缩执行器。
PAM操作背后的物理原理与人体肌肉相同,因为它将气动功率转换为拉力。空气的可压缩性在人造肌肉中起着不可预测的影响的重要作用。如图1所示,根据不同的工作原理、应用和设计理念,开发了各种类型的传统PAM。
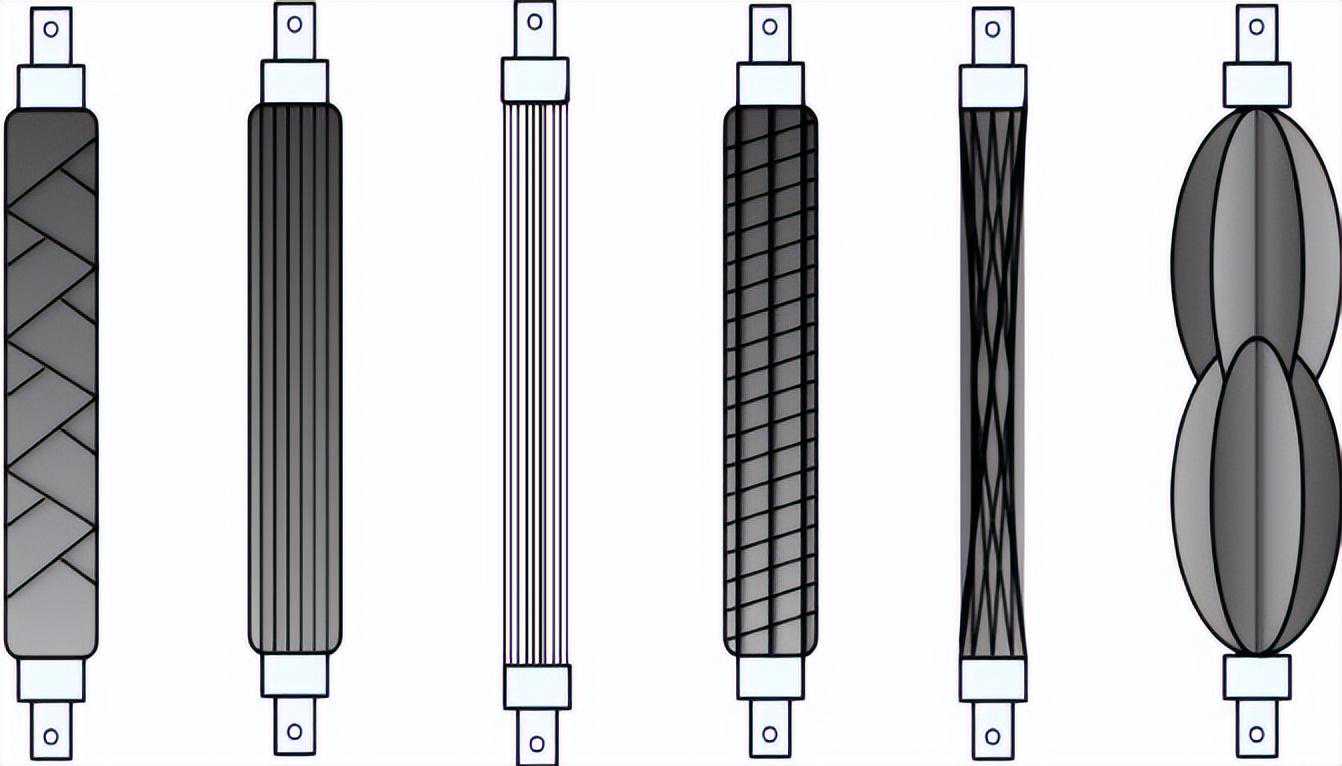
图1PAM的类型
气动人工肌肉(PAM)是一种由气压操作的收缩和线性运动执行器。大多数此类执行器的主要两个部分是柔性芯和增强的封闭膜,如外壳和隔膜。这些肌肉致动器的两端都用端部配件(闭合件、夹具)封闭。
核心膜由于气压的供给而向外凸出或被挤压,并通过核心膜将机械动力传递至负载。由于径向膨胀或收缩,铁芯轴向收缩对其负载施加拉力。因此,PAM致动器实现的力(张力、负载)和运动是线性和单向的。
要了解肌肉执行器的基本概念和工作原理。这种在膨胀时延伸的收缩操作将这些致动器与波纹管区分开来。PAM在文献中有多种名称:气动肌肉致动器、流体致动器、流体驱动张力致动器、轴向收缩致动器和张力致动器。
因此,通过将压缩空气供应到肌肉中,可以获得移动负载所需的运动,反之亦然通过释放气压。
气动人工肌肉分类编织肌由气密的弹性管或气囊组成,周围环绕着编织网(编织、编织、套筒),如图2所示。编织纤维以一定角度(螺距角、编织角、编织角)围绕肌肉的长轴螺旋延伸。管子被横向压在套管上,管子内部的内部压力受到由于纤维曲率造成的编织纤维张力的限制。
纤维张力被纳入编织物的端点以平衡外部负载。因此,管和套管之间的挤压接触对于提升负载是必要的,并且编织肌肉不能在负压下工作。
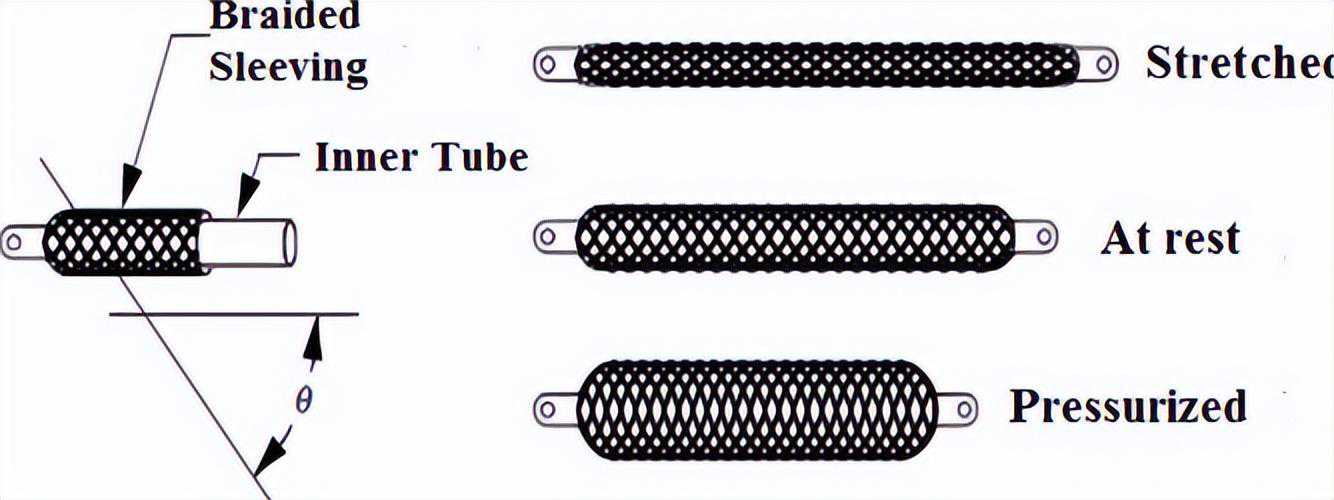
图2编织肌肉及其工作
褶皱肌肉执行器由Daerden和Lefeber开发,如图3所示。这种类型的肌肉在充气时不涉及材料应变和摩擦。这是由于肌肉膜,它由轴向方向的多个褶皱组成,并通过展开褶皱而膨胀。
此外,平行方向(垂直于轴)的膜应力保持在可忽略不计的小值,并且随着折叠数量的增加而减小。
基本上,不需要外部能量来使膜膨胀,并且由于没有摩擦,没有观察到滞后现象。这种类型的肌肉的特性取决于全长与最小直径的比率、膜材料的应变行为、收缩率和施加的压力。
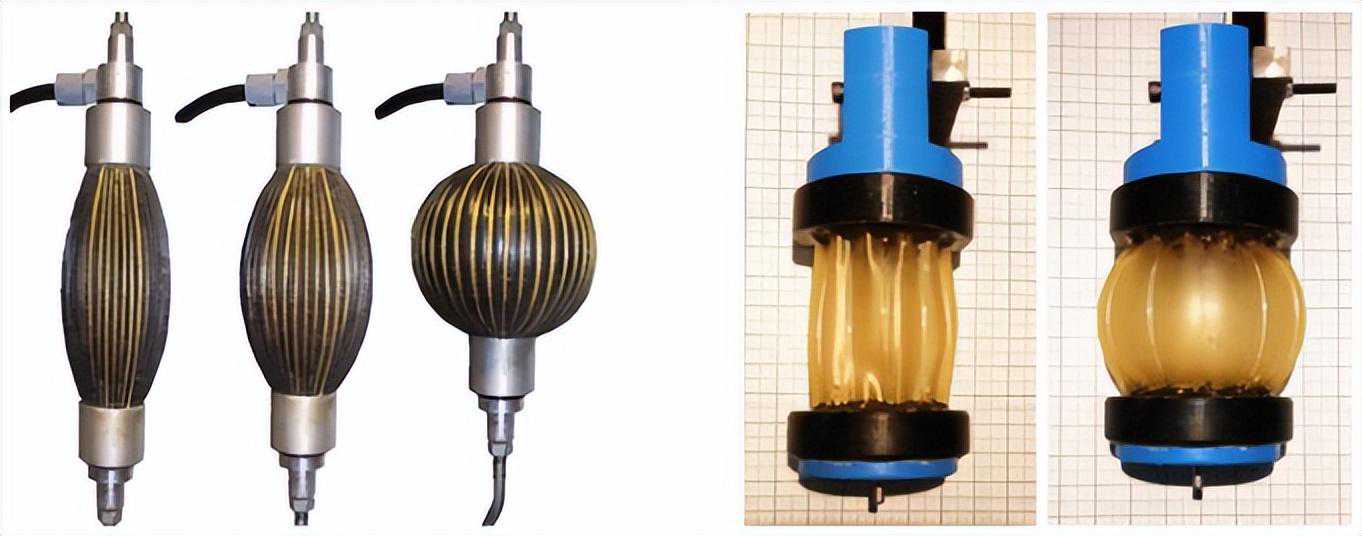
图3褶皱肌肉执行器
编织肌肉和网状肌肉之间的主要区别在于膜周围网格的密度,其中具有相对较大孔和编织物的网格紧密编织。
因此,该膜属于拉伸类型,肌肉只能承受低压。因此,这种类型的肌肉致动器通常会有一个重新排列的隔膜。图4a显示了JMYarlott的Yarlott肌肉,它包括由一系列绳索或股线组成的长球形弹性囊。
该致动器在膨胀状态下呈球形囊状,当伸长时,轴向线伸直并将囊推成具有一系列脊和谷的形状。图4b显示了另一种类型的网状肌肉,机器人肌肉执行器(ROMAC),由和于1986年设计。
ROMAC由一个铰接的多叶囊组成,该囊由金属丝网固定,两端由配件封闭,其中囊由护套制成,其特点是高拉伸刚度、柔韧性和液密性。网或安全带由不可拉伸的柔性张力连接件组成,这些张力连接件在节点处连接以在网络中形成四边菱形孔。
图4c显示了的Kukolj肌肉,这是标准McKibben肌肉的改良版。肌肉的主要区别在于袖子,McKibben肌肉有紧密编织的辫子,而Kukolj设计使用开放式网状网。在无铅条件下,网和膜之间存在间隙,只有在适当高的延伸负载下该间隙才会消失。
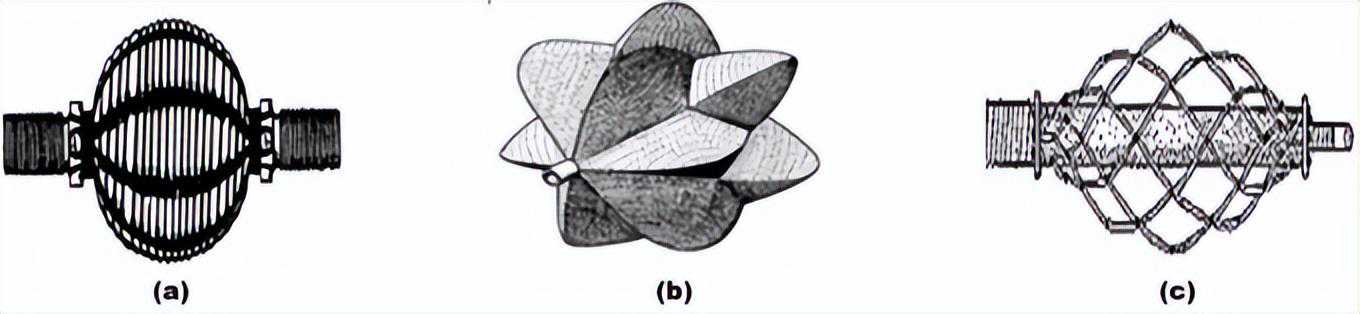
图4网状肌肉
在嵌入式肌肉中,执行器的承载结构嵌入其膜中。AHMorin的Morin肌肉由嵌入高拉伸刚度螺纹的橡胶管组成。螺纹可以沿致动器的长轴排列或围绕该轴排列成双螺旋,并且可以使用纤维材料,如棉、人造丝、石棉或钢。
根据操作压力的工作,图5中显示了莫林肌的三种设计,即纵向截面所示的超压设计、负压设计和同心膜设计。HABaldwin的Baldwin肌肉,基于Morin肌肉的设计,由弹性膜组成,这是一种非常薄的外科橡胶,由玻璃丝沿轴向嵌入。
于1964年在华沙理工学院开发的负压人工肌肉(UPAM)与Morin肌肉具有相似的设计。当气体从膜中吸出时,它以非轴对称方式塌陷,即,它在中间被挤压和压扁。
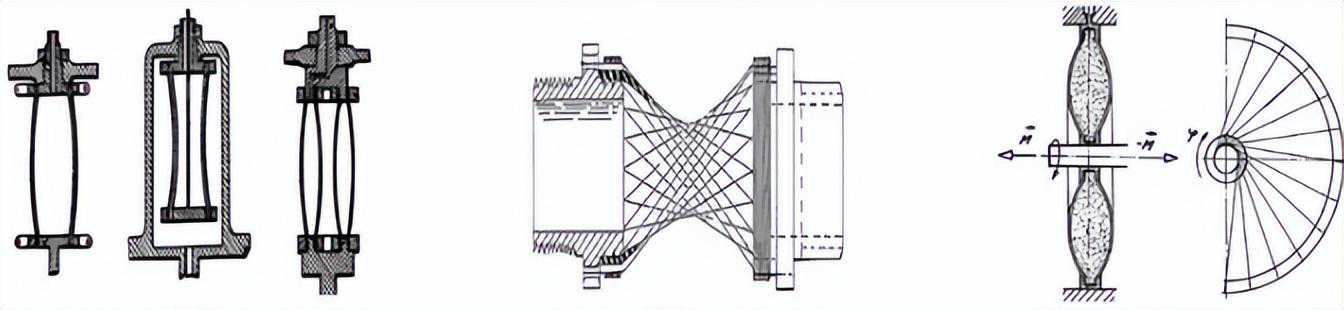
图5嵌入肌肉
由HMPaynter开发的Paynter针织肌肉具有弹性材料制成的球形囊,由坚固、坚韧和柔韧的纤维编织结构增强。当完全膨胀时,肌肉呈现出原始膀胱和编织球体的形状。图5显示了Paynter双曲面肌肉,这是HMPaynter描述的另一种设计。
肌肉的弹性膜由氯丁橡胶或聚氨酯制成,在完全伸长的状态下呈旋转双曲面的形状。膜嵌入在套筒中,套筒由不可延伸的柔性金属线、绳索、聚酯纤维或对位芳纶纤维制成,连接到端部配件上。
图5显示了Kleinwachter和Geerk设计的Kleinwachter扭转装置,其中充气膜技术可用于设计扭转装置,即扭转肌。该装置有一个嵌入加强丝的环形隔膜,其外边缘连接到环形结构,其内边缘连接到轴。
编织肌肉是一种结构紧凑的气动人工肌肉,具有较高的力量输出能力。由于其编织的纤维结构,编织肌肉可以承受大的压力,能够产生强大的力量。然而,编织肌肉的制造工艺复杂,成本较高,维护和修复也相对困难。
褶皱肌肉执行器是一种外形呈褶皱状的气动人工肌肉。它具有较高的柔性和适应性,可以实现复杂的运动模式。褶皱肌肉执行器响应速度快,但力量输出相对较低,对精确控制的要求较高。
网状肌肉是一种具有网状结构的气动人工肌肉。它可以实现高度的柔性和自由度,在运动控制上具有较高的精确度。然而,网状肌肉的制造和控制较为复杂,需要更多的气动控制系统和传感器。
嵌入肌肉是将气动人工肌肉嵌入到其他材料或结构中的一种形式。它能够实现紧凑的结构和更好的集成性。然而,嵌入肌肉的安装和维护比较复杂,需要特殊的技术和设备。
气动人工肌肉的应用第一个商用气动人工肌肉(PAM)由日本东京的普利司通公司在20世纪80年代后期制造和销售,被称为“Rubbertuators”,并在各种应用中使用了一段时间。如今,英国的ShadowGroupofCompanies和德国的FestoAGCo.正在生产用于工业机器人和医疗应用的各种PAM。
PAM非常适合多种应用,例如外骨骼和康复辅助,抓取和处理具有复杂几何形状的精致物体,需要多种复杂运动的机器人机构,以及工业和服务机器人。PAM主要用作机器人执行器,用于要求合规性和低功率重量比的应用中。袖状膀胱肌肉有可能成为假肢中合适的动力系统。
PAM已用于各种生物机器人应用或模仿人类和动物形态和生理学的仿生机器人。如图6所示。Airbug是一种六足昆虫状机器人,由Berns等人开发。在对抗性排列中使用流体肌。Jaryani提出了一系列对抗性人工肌肉驱动装置的动态公式,用于产生蛇形机器人平面运动的运动和计算肌肉力控制。Ajax是一款受蟑螂启发的有腿机器人,如图6所示。
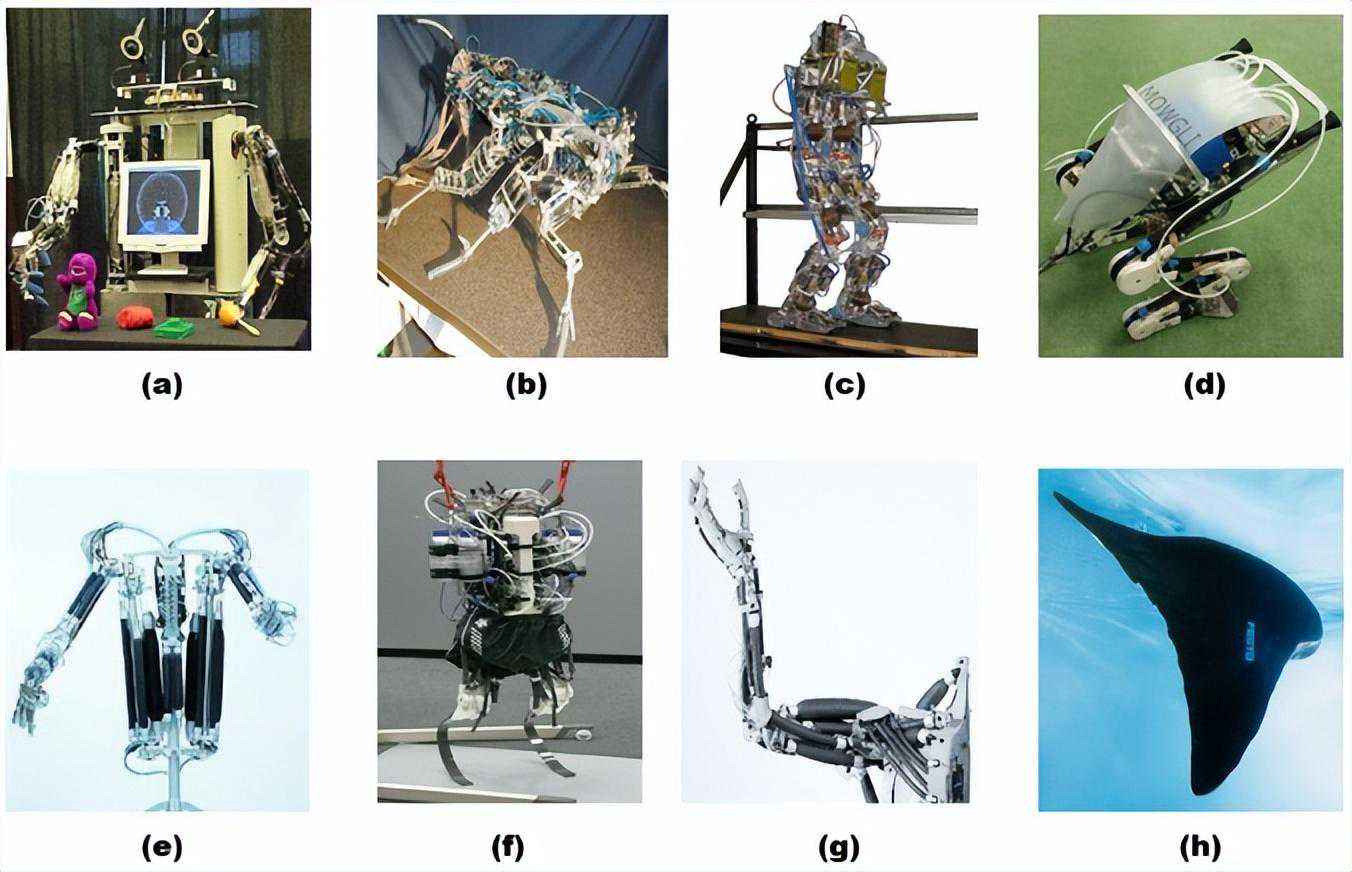
图6仿生机器人
气动人工肌肉在医疗领域有着广泛的应用前景。由于其优异的柔性和可控性,它可以被用于替代病患或残疾人的肌肉功能。例如,在康复治疗中,气动人工肌肉可以帮助恢复瘫痪患者的肢体功能。
通过与神经系统的连接,它可以模拟真实的肌肉运动,提供肌肉力量和控制能力,帮助患者恢复行走、抓握等基本动作能力。此外,气动人工肌肉还可以用于假肢的设计与制造,使得假肢更加贴近自然肢体的运动方式,提升使用者的生活质量。
气动人工肌肉在机器人技术中有重要的应用。机器人通常需要与环境进行交互,而气动人工肌肉可以为机器人提供类似于人类肌肉的动作能力和柔韧性。通过搭载气动人工肌肉,机器人可以更加灵活地完成各种任务,如抓取、搬运和操作。
此外,气动人工肌肉还可以用于机器人的外骨骼设计,增强机器人的力量和运动能力。例如,在救援任务中,机器人配备气动人工肌肉的外骨骼可以承担起危险和重负,帮助人类完成各种艰苦的工作。
气动人工肌肉还在人机交互领域具有重要意义。人机交互技术的发展要求机器能够更好地理解和响应人类的意图和指令。通过使用气动人工肌肉,机器可以更加自然地模仿人类的动作,与人类进行更加直观和高效的交互。
然而,尽管气动人工肌肉具有巨大的应用潜力,但目前仍面临一些挑战和限制。其中之一是控制系统的复杂性。气动人工肌肉的运动需要精确的控制和协调,以模仿人类肌肉的运动方式。
因此,开发高效、稳定和精确的控制算法和系统是一个重要的研究方向。此外,气动人工肌肉的制造材料和结构设计也需要不断改进,以提高其可靠性、耐用性和适应性。
未来的气动人工肌肉将追求更高的性能和效能。通过改进材料的性能和制造工艺,使气动人工肌肉能够承受更大的力量和压力,同时保持良好的柔性和可控性。此外,优化气动系统和控制算法,提高肌肉的响应速度和精确度,使其更加适应复杂的运动任务。
未来的气动人工肌肉将趋向于小型化和微型化。随着微纳技术的发展,可以在微尺度上制造气动人工肌肉,使其可以应用于微型机器人、医疗器械等领域。这将极大地拓展气动人工肌肉的应用范围,并为微型设备的发展提供新的驱动力。
未来的气动人工肌肉将与可穿戴技术和人体增强相结合。通过将气动人工肌肉应用于智能服装、外骨骼和人体增强设备中,可以增强人体的力量、灵活性和运动能力。这将有助于改善工作效率、康复治疗和日常生活的便利性。
气动人工肌肉的发展将需要多学科的融合和合作应用。工程学、材料科学、控制科学、生物学等多个领域的专家将联合研究和开发气动人工肌肉,以推动其技术的进步和应用的广泛性。
此外,与其他技术和系统的结合也将成为发展的重要方向,例如与人工智能、虚拟现实、生物医学等领域的技术结合,共同实现更多样化和高效的应用。
未来气动人工肌肉的发展将朝着高性能、自适应、小型化、可穿戴和多学科融合的方向前进。这将为医疗、机器人技术、人机交互等领域带来更多创新和突破,为人类的生活和科技进步做出更大的贡献。
参考文章:Kalita,B.;Leonessa,A.;Dwivedy,:,11,288.